Vorbereitung
Euer Roboter sollte so gebaut sein, dass er zwei Motoren zum Fahren besitzt. Hiergibt es eine Bauanleitung.
Zum Programmieren des Roboters sollt ihr die Programmierumgebung NEPO®benutzen.
Wählt in Open-Roberta den EV3 c4ev3 als System.
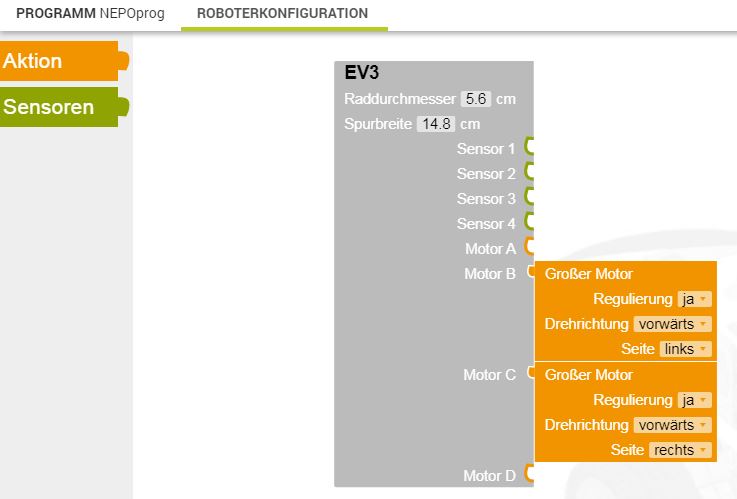
In Open-Roberta muss die Roboterkonfiguration an euren Roboter angepasst werden:
Quellen
- [1]: - Urheber: LW - Lizenz: inf-schule.de
