Der Roboter lernt ein Hindernis zu erkennen
Der Ultraschallsensor
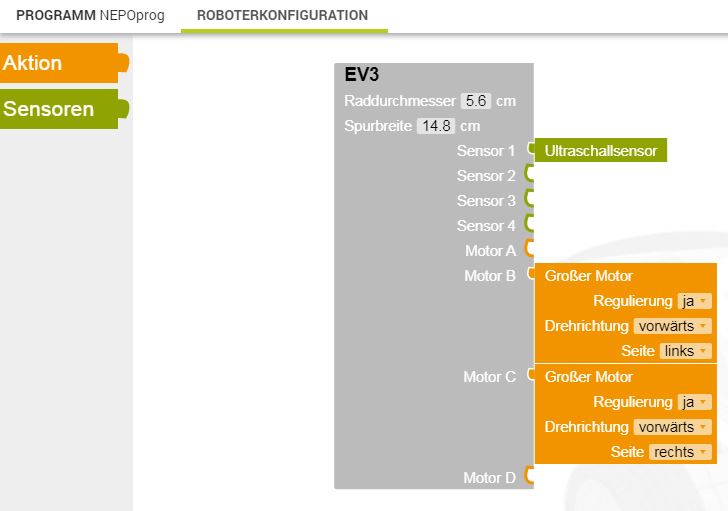
Beim Wenden in drei Zügen tritt der Autofahrer auf die Bremse, wenn er beim Rückwärtsfahren einem Hindernis zu nahe kommt. Euer Roboter soll nun selbst beim Rückwärtsfahren ein Hindernis erkennen und in einer bestimmten Entfernung zum Hindernis anhalten. Zum Erkennen eines Hindernisses benötigt der Roboter einen bestimmten Sensor, den Ultraschallsensor. Mit Sensoren bezeichnet man allgemein ein Bauteil zur Messung von Umgebungsbedingungen. Bringt den Ultraschallsensor an der Rückseite eures Roboters an und konfiguriert euren Roboter in Open Roberta.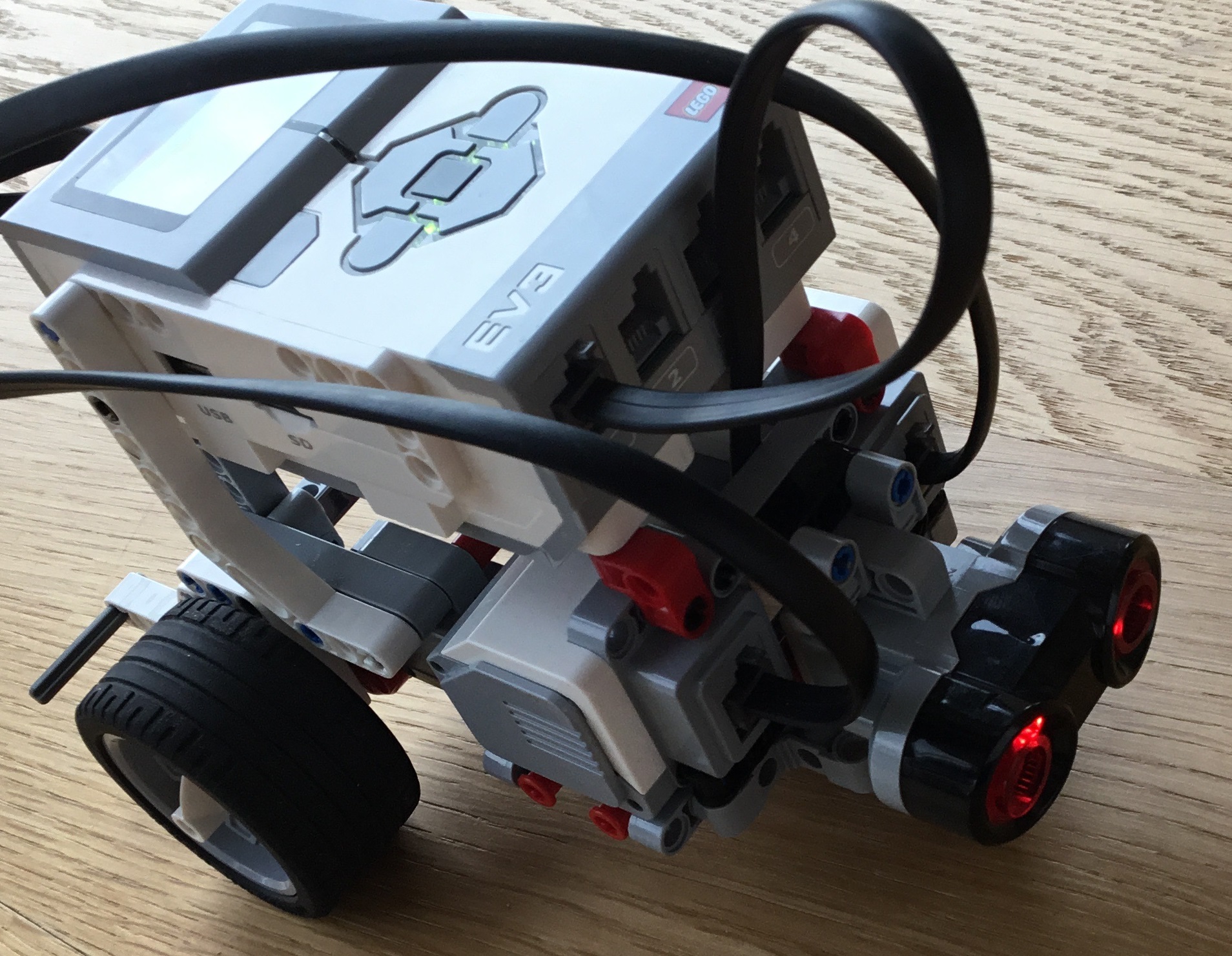
Aufgabe 1
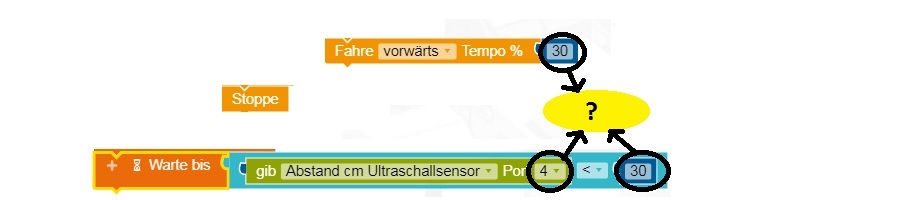
Programmiert den Roboter so, dass er rückwärtsfährt bis er ein Hindernis erkennt und in einer bestimmten Entfernung anhält. Dazu braucht ihr folgende Programmierblöcke aus den Rubriken „Aktion“ und „Kontrolle“, die ihr in richtiger Reihenfolge und mit der richtigen Einstellung einsetzen müsst.
Quellen
- [1]: - Urheber: LW - Lizenz: inf-schule.de
- [2]: - Urheber: LW - Lizenz: inf-schule.de
- [3]: - Urheber: LW - Lizenz: inf-schule.de
