Der Roboter im Rückwärtsgang
 Wenn man mit dem Auto rückwärtsfahren möchte, muss man den Rückwärtsgang einlegen.
Wenn man mit dem Auto rückwärtsfahren möchte, muss man den Rückwärtsgang einlegen.
Aufgabe 1
Beobachtet das Auto im Video ganz genau. Was passiert, wenn es rückwärtsfährt und warum?
Der Roboter bekommt einen Rückwärtsgang
Euer Roboter soll nun selbst einen Rückwärtsgang bekommen. Dieser wird durch einen Druck des Berührungssensors simuliert. Mit Sensoren bezeichnet man allgemein ein Bauteil zur Messung von Umgebungsbedingungen. Hier misst der Sensor, ob Druck auf ihn ausgeübt wird. Habt ihr Ideen, was ein (anderer) Sensor noch messen könnte?
Aufgabe 2
Programmiert den Roboter so, dass er vorwärtsfährt bis ihr den Berührungssensor drückt, also in den Rückwärtsgang schaltet. Dann soll der Roboter rückwärtsfahren und dabei ein rotes Signal über die Statusleuchte ausgeben. Dazu braucht ihr folgende Programmierblöcke aus den Rubriken „Aktion“ und „Kontrolle“, die ihr in richtiger Reihenfolge und mit der richtigen Einstellung einsetzen müsst.
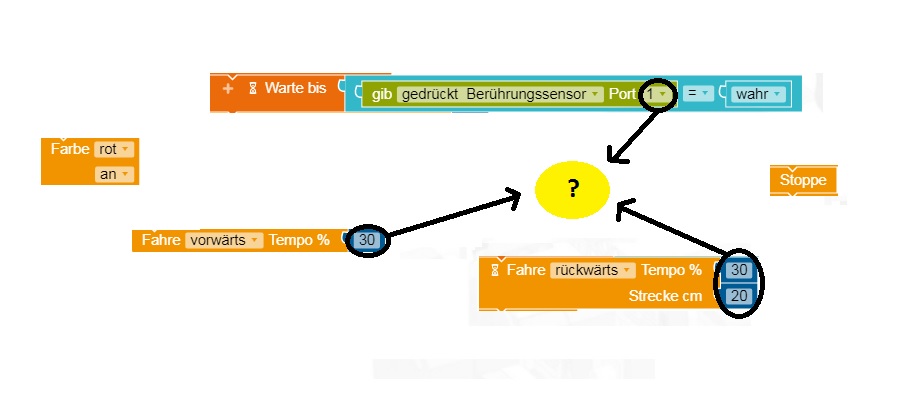
Der Warteblock
Der Warteblock enthält eine Bedingung. Eine Bedingung ist wie eine Frage, die man mit "ja" oder "nein" beantworten muss. Beispiel: "Ist der Berührungssensor gedrückt?"
Quellen
- [1]: - Urheber: LW - Lizenz: inf-schule.de
